- Primeros pasos
- Mejores prácticas
- Tenant
- Acerca del contexto de tenant
- Buscar recursos en un tenant
- Gestionar robots
- Conexión de los robots a Orchestrator
- Almacenar credenciales de robots en CyberArk
- Almacenar contraseñas de robots desatendidos en Azure Key Vault (solo lectura)
- Almacenar las credenciales de robots desatendidos en HashiCorp Vault (solo lectura)
- Almacenamiento de credenciales de Unattended Robot en AWS Secrets Manager (solo lectura)
- Eliminar sesiones desconectadas y sin respuesta no atendidas
- Autenticación de Robot
- Autenticación de robots con credenciales de cliente
- Configurar las capacidades de automatización
- Soluciones
- Auditoría
- Configuración
- Registro
- Cloud Robots
- Descripción general de Cloud Robots
- Ejecución de automatizaciones unattended utilizando robots en la nube: VM
- Cargar tu propia imagen
- Reutilizar imágenes de máquina personalizadas (para grupos manuales)
- Restablecer credenciales para una máquina (para grupos manuales)
- Supervisión
- Actualizaciones de seguridad
- Pedir una prueba
- Preguntas frecuentes
- Configuración de VPN para robots en la nube
- Configurar una conexión de ExpressRoute
- Transmisión en vivo y control remoto
- Automation Suite Robots
- Contexto de carpetas
- Procesos
- Trabajos
- Apps
- Desencadenadores
- Registros
- Supervisión
- Índices
- Colas
- Activos
- Sobre los activos
- Gestión de Activos en Orchestrator
- Gestión de Activos en Studio
- Almacenar activos en Azure Key Vault (solo lectura)
- Almacenamiento de activos en HashiCorp Vault (solo lectura)
- Almacenamiento de activos en AWS Secrets Manager (solo lectura)
- Almacenamiento de activos en Google Secret Manager (solo lectura)
- Conexiones
- Reglas empresariales
- Depósitos de almacenamiento
- Servidores MCP
- Pruebas de Orchestrator
- Servicio de catálogo de recursos
- Integraciones
- Solución de problemas

Guía del usuario de Orchestrator
Transmisión en vivo y control remoto a través de TightVNC
Esto se aplica a las versiones de Robot 2023.4 y 2023.10.
Las características de transmisión en vivo y control remoto están disponibles para:
- Versiones de Windows Robots 2023.4 y 2023.10
- Automation Cloud Robots - Serverless
- Robots Automation Cloud: máquina virtual (VM)
Debido a limitaciones técnicas, no podemos ofrecer compatibilidad completa con Robots Linux, pero los principales casos de uso están disponibles en esta iteración.
Esta funcionalidad no se puede utilizar con los trabajos en segundo plano de Windows.
Requisitos previos para Windows Robots 2023.10 y anteriores
- Habilita SignalR. Detalles...
- Instala un servidor VNC siguiendo estos pasos:
- Descarga TightVNC. La versión que admitimos actualmente es la 2.8.75.
- Ejecuta el instalador y, una vez que llegues a la pantalla Seleccionar tipo de configuración, selecciona Personalizado.
- Haz clic en Siguiente.
- Asegúrate de que la opción Registrar el servidor TightVNC como servicio del sistema (dentro de la configuración del servicio TightVNC) no está seleccionada.
- Si utilizas una máquina física, debes conectarle un monitor.
Requisitos de red
Los requisitos mínimos de red para que una sesión de transmisión en vivo y control remoto funcionen sin problemas pueden variar significativamente debido a varios factores:
- La resolución de la pantalla del robot
- Los cambios impulsados por su automatización: cuanto más dinámicos son los cambios en las imágenes y el texto, mayor será el volumen de tráfico
- La latencia entre su máquina y la región de Automation Cloud
- La latencia entre su robot y la región de Automation Cloud
Teniendo en cuenta lo anterior, recomendamos un ancho de banda de red de 3 MB / s para una resolución de pantalla de 1920 x 1080.
Consideraciones de seguridad
La conexión de transmisión en directo entre el cliente y la máquina de destino se hace pasar por TLS a través del proxy VNC, lo que significa que el servidor está seguro.Además, cada vez que se inicia una sesión de transmisión en directo, se genera un token JWT único y se utiliza para autenticar la solicitud. La única instancia de tráfico no seguro es en la máquina del robot para la conexión localhost.
En el lado del robot, se genera una contraseña única para cada trabajo y se establece para el servidor VNC. El servidor solo se ejecuta durante la sesión de transmisión en directo. Cuando el usuario se desconecta de la sesión, el servidor VNC también se cierra.
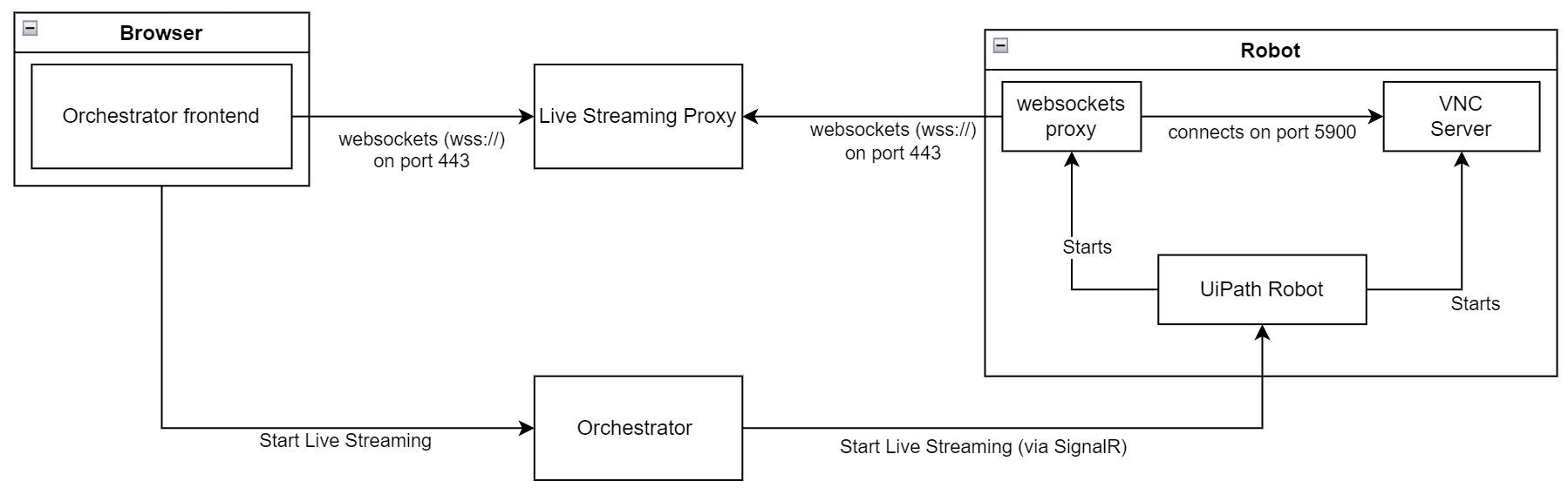
Flujo de red
- Cuando se realiza una solicitud desde la interfaz de Orchestrator para iniciar la transmisión en directo, Orchestrator envía un comando al robot para iniciar una nueva sesión de control remoto.
- El robot inicia un servidor VNC que escucha en un puerto dinámico. El servidor VNC se inicia solo como bucle inverso, lo que deshabilita las conexiones remotas. El comando Orchestrator también incluye una contraseña para la autenticación VNC, que se comparte entre el servidor VNC y el cliente del navegador.
- A continuación, el robot inicia lo siguiente:
- otro programa que se conecta al servidor VNC local en un puerto dinñamico
- un proxy de transmisión en directo de UiPath
El programa reenvía todo el tráfico TCP al proxy de transmisión en vivo convirtiéndolo en el protocolo WebSocket Secure (wss). 4. El cliente VNC de Orchestrator se conecta al mismo proxy de transmisión en vivo cuyo trabajo es emparejar los dos websockets: uno del cliente VNC en el navegador y el otro del robot. A continuación, crea un túnel entre los dos websockets y reenvía cualquier tráfico de un websocket al otro.
El cliente VNC utiliza dos puertos: 443 y 5900.
El puerto 443 debe estar abierto para conectarse a un servicio auxiliar en línea.
El puerto 5900 funciona localmente en la misma máquina para canalizar el tráfico entre dos aplicaciones.
Para que la comunicación funcione, estos puertos deben abrirse en ambas direcciones para permitir tanto el tráfico entrante como saliente.
Figura 1. Diagrama de flujo de red
Configuración de TightVNC
Antes de que la sesión se inicie en la máquina local, las conexiones HTTP se deshabilitan y el servidor VNC se configura para no aceptar conexiones externas a la máquina local.