- Introdução
- Melhores práticas
- Tenant
- Sobre o contexto do tenant
- Pesquisa de recursos em um tenant
- Gerenciamento de robôs
- Conectar Robôs ao Orchestrator
- Armazenamento de credenciais do robô no CyberArk
- Armazenamento de senhas do Unattended Robot no Azure Key Vault (somente leitura)
- Armazenamento de credenciais do Unattended Robot no HashiCorp Vault (somente leitura)
- Armazenando credenciais de Unattended Robots no AWS Secrets Manager (somente leitura)
- Exclusão de sessões não assistidas desconectadas e não responsivas
- Autenticação do robô
- Autenticação de robôs com credenciais de cliente
- Configuração de recursos de automação
- Soluções
- Auditar
- Configurações
- Registro
- Cloud Robots
- Visão geral dos robôs do Cloud
- Execução de automações Unattended usando Cloud Robots - VM
- Carregamento de sua própria imagem
- Reutilização de imagens de máquinas personalizadas (para pools manuais)
- Redefinição de credenciais para uma máquina (para pools manuais)
- Monitoramento
- Atualizações de segurança
- Como solicitar uma avaliação
- Perguntas frequentes
- Configurando VPN para Robôs de nuvem
- Configurar uma conexão ExpressRoute
- Transmissão ao vivo e controle remoto
- Automation Suite Robots
- Contexto de Pastas
- Processos
- Trabalhos
- Apps
- Gatilhos
- Logs
- Monitoramento
- Índices
- Filas
- Ativos
- Sobre ativos
- Gerenciamento de ativos no Orchestrator
- Gerenciamento de ativos no Studio
- Armazenamento de ativos no Azure Key Vault (somente leitura)
- Armazenamento de ativos no HashiCorp Vault (somente leitura)
- Armazenando ativos no AWS Secrets Manager (somente leitura)
- Armazenamento de ativos no Google Secret Manager (somente leitura)
- Conexões
- Regras de Negócios
- Armazenar Buckets
- Servidores MCP
- Teste do Orquestrador
- Serviço Catálogo de recursos
- Integrações
- Solução de problemas

Guia do usuário do Orchestrator
Transmissão ao vivo e controle remoto por meio de RealVNC
Isso se aplica a versões do UiPath Robot 2023.12+.
As funcionalidades de transmissão ao vivo e controle remoto estão disponíveis para:
- Versões do Windows Robots 2023.12 e mais recentes
- Automation Cloud Robots - Serverless
- Automation Cloud Robots - VM
- Robôs do Linux
Observação:
Essa funcionalidade não pode ser usada com trabalhos em segundo plano do Windows.
Pré-requisito para o Windows Robots 2023.12 e mais recente
Habilite o Signal R. Acesse a seção de configuração do tenant do SignalR para obter detalhes.
Requisitos de rede
Os requisitos mínimos de rede para que uma sessão de transmissão ao vivo e controle remoto funcione sem problemas podem variar significativamente, devido a vários fatores:
- A resolução de tela do robô
- As alterações geradas pela sua automação - quanto mais dinâmicas forem as alterações nas imagens e no texto, maior o volume de tráfego
- A latência entre sua máquina e a região do Automation Cloud
- A latência entre seu robô e a região do Automation Cloud
Considerando o acima, recomendamos uma largura de banda de rede de 3 MB/s para uma resolução de tela de 1920x1080.
Considerações de segurança
A conexão de transmissão ao vivo entre o cliente e a máquina de destino é encapsulada por meio do TLS pelo proxy VNC, o que significa que o servidor está protegido. Além disso, toda vez que uma sessão de transmissão ao vivo for iniciada, um token JWT exclusivo será gerado e usado para autenticar a solicitação. A única instância de tráfego não seguro está na máquina do Robot para a conexão do localhost.
No lado do Robot, é gerada uma senha exclusiva para cada trabalho, e definida para o servidor VNC. O servidor só é executado durante a sessão de transmissão ao vivo. Quando o usuário se desconecta da sessão, o servidor VNC também é fechado.
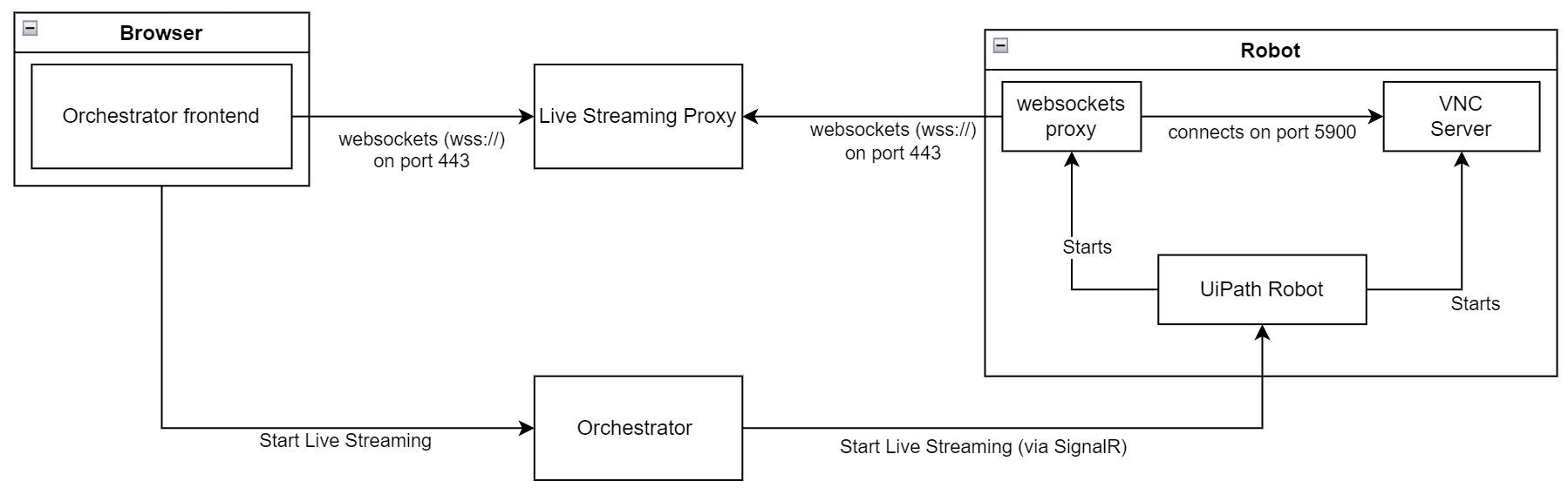
Fluxo de rede
- Quando você faz uma solicitação a partir da interface do Orchestrator para iniciar a transmissão ao vivo, o Orchestrator envia um comando para o robô iniciar uma nova sessão de controle remoto.
- O robô inicia um servidor VNC que ouve em uma porta dinâmica. O servidor VNC é iniciado como somente loopback, que desabilita conexões remotas. O comando do Orchestrator também inclui uma senha para autenticação de VNC, que é compartilhada entre o servidor VNC e o cliente do navegador.
- O robô inicia então o seguinte:
- outro programa que se conecta ao servidor VNC local em uma porta dinâmica
- um proxy de transmissão ao vivo da UiPath
O programa encaminha todo o tráfego TCP para o proxy de transmissão ao vivo convertendo-o no protocolo WebSocket Secure (wss). 4. O cliente VNC do Orchestrator conecta-se ao mesmo proxy de transmissão ao vivo, cujo trabalho é emparelhar dois websockets: um do cliente VNC no navegador e outro do robô. Em seguida, ele cria um túnel entre os dois websockets e encaminha qualquer tráfego de um websocket para o outro.
O cliente VNC usa duas portas: 443 e 5900.
A porta 443 deve estar aberta para conectar-se a um serviço online auxiliar.
A porta 5900 opera localmente na mesma máquina para encaminhar o tráfego entre dois aplicativos.
Para que a comunicação funcione, essas portas precisam ser abertas bidirecionalmente para permitir o tráfego de entrada e de saída.
Figura 1. Diagrama de fluxo de rede