- 基本情報
- ベスト プラクティス
- テナント
- Cloud ロボット
- フォルダー コンテキスト
- 自動化
- プロセス
- ジョブ
- Apps (アプリ)
- トリガー
- ログ
- 監視
- キュー
- アセット
- ストレージ バケット
- Orchestrator のテスト
- リソース カタログ サービス
- 認証
- Integrations
- クラシック ロボット
- トラブルシューティング

Orchestrator ユーザー ガイド
ジョブとは、UiPath Robot でプロセスを実行することです。ジョブは、Attended または Unattended のいずれかのモードで起動できます。Attended ロボットでのジョブは Orchestrator からは開始できず、ロックされた画面でも実行できません。
|
有人モード |
無人モード |
|---|---|
|
[オートメーション] ページ > [ジョブ] [オートメーション] ページ > [トリガー] [オートメーション] ページ > [プロセス] |
既定では、関連付けられているジョブが実行中または保留中となっているプロセスも、すべて編集できます。
- 変更されたプロセスと関連付けられた実行中のジョブでは、元のバージョンのプロセスが使用されます。更新後のバージョンは、新規作成されたジョブで、または同じジョブが次にトリガーされたときに使用されます。
- 変更されたプロセスと関連付けられた保留中のジョブでは、更新されたバージョンが使用されます。
ジョブの実行元は、そのジョブの起動メカニズムに応じて、以下の 3 つが考えられます。
- [手動] - ジョブは [ジョブ]/[トリガー]/[プロセス] ページで設定され、[開始] ボタンによって開始されました。
- [エージェント] - ジョブは UiPath ロボット トレイ、UiPath Assistant、またはコマンド ラインから有人モードで開始されました。
- トリガー名 - ジョブは、あらかじめ計画されたジョブの実行に使用されるトリガーによって起動されました。
|
説明 | |
|---|---|
|
動的に割り当て |
ユーザーかマシンのいずれか先に使用可能になった方により、フォアグラウンド プロセスが複数回実行されます。 [ユーザー] も選択している場合は、マシンの割り当てのみが動的に行われます。 バックグラウンド プロセスは、ビジーであるかどうかにかかわらず、任意のユーザーによって実行されます (十分な数のランタイムがある場合)。 プロセスは、最大 10,000 回実行できます。 |
|
特定のロボット |
プロセスは、ロボットのリストから選択された特定のロボットによって実行されます。 |
ホスト マシンでは、対応するマシン テンプレートを割り当てるフォルダーに属する各ユーザーに対して、Windows のユーザーをプロビジョニングする必要があります。
たとえば、マシン テンプレート FinanceT によって生成されたキーを使用して、サーバーを Orchestrator に接続したとします。このマシン テンプレートは、FinanceExecution フォルダーと FinanceHR フォルダーに割り当てられ、これらのフォルダーには 6 人のユーザーも割り当てられます。これらの 6 人のユーザーは、サーバー上の Windows ユーザーとしてプロビジョニングされている必要があります。
同じプロセスを複数回実行するようにジョブを設定した場合、各実行に対してジョブ エントリが作成されます。ジョブの順序はジョブの優先度と作成時刻によって決まり、より高い優先度のより古いジョブが待ち行列の先頭に配置されます。ロボットが使用可能になり次第、待ち行列内の次のジョブが実行されます。それまでの間、ジョブは保留ステートのままです。
例
セットアップ
- 1 フォルダー
- 2 ランタイムが設定された 1 つのマシン テンプレート
- ユーザー 2 人: john.smith と petri.ota
- ユーザーによる操作が必要なプロセス 2 つ: P1 - キューにキュー アイテムを追加します。P2 - キュー内のアイテムを処理します。
- マシン テンプレートとユーザーをプロセスが含まれるフォルダーに関連付ける必要があります。
望ましい結果
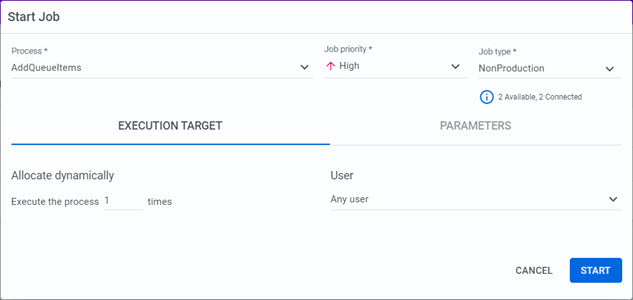
- P1 は任意のユーザーにより高優先度で実行される。
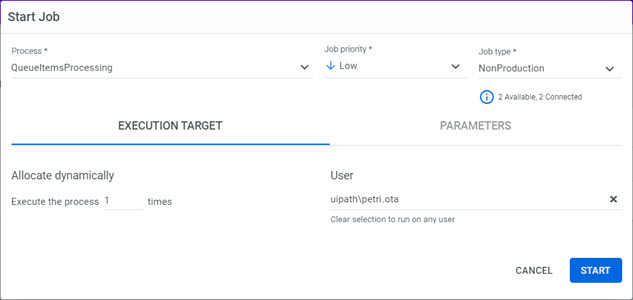
- P2 は petri.ota により低優先度で実行される。
必要なジョブ設定
- P1 を使用してジョブを開始します。P1 は特定のユーザーには割り当てません。また、優先度は [高] に設定します。
- P2 のジョブを開始します。P2 は petri.ota に割り当てます。また、優先度は [低] に設定します。
競合するジョブのうちどれを優先させるかは、プロセスのデプロイ時またはそのプロセスのジョブ/トリガーの設定時に、[ジョブの優先度] フィールドで指定できます。ジョブには、次の優先度のいずれか 1 つを設定できます。[低] (↓)、[標準] (→)、[高] (↑)。
ジョブを手動で開始する
優先度は、最初の設定が継承されます。その設定をそのまま使用することも、変更することもできます。
[オートメーション] ページ > [ジョブ]: プロセス レベルで設定された優先度を継承します。
[オートメーション] ページ > [トリガー]:トリガー レベルで設定された優先度を継承します。トリガー自体もプロセス レベルの優先度を継承した場合は、その優先度が適用されます。
[オートメーション] ページ > [プロセス]: そのプロセスに設定された優先度を使用します。
同じプロセスを複数回実行するようにジョブを設定した場合、各実行に対してジョブ エントリが作成されます。ジョブの順序はジョブの優先度と作成時刻によって決まり、より高い優先度のより古いジョブが待ち行列の先頭に配置されます。ロボットが使用可能になり次第、待ち行列内の次のジョブが実行されます。それまでの間、ジョブは保留ステートのままです。
トリガーによるジョブの開始
優先度は既定で [継承] に設定されます。つまり、プロセス レベルで設定された値を継承します。プロセスを選択すると、矢印のアイコンが、プロセス レベルで設定された値を示すよう自動的に更新されます。トリガーによって起動されたジョブの優先度は、すべてトリガー レベルで設定されます。ただし、既定の [継承] をそのまま使用した場合、それらのジョブはプロセス レベルで設定された優先度で起動されます。
プロセスにはユーザー インターフェイスの要件に応じて 2 つの種類があります。
 バックグラウンド プロセス - 実行時にユーザー インターフェイスもユーザーの介入も必要としないプロセスです。そのため、こうしたジョブは、無人モードで同じユーザーに対して複数を同時に実行できます。各実行には、Unattended/NonProduction のライセンスが必要です。バックグラウンド プロセスを無人モードで開始すると、セッション 0 で実行されます。
バックグラウンド プロセス - 実行時にユーザー インターフェイスもユーザーの介入も必要としないプロセスです。そのため、こうしたジョブは、無人モードで同じユーザーに対して複数を同時に実行できます。各実行には、Unattended/NonProduction のライセンスが必要です。バックグラウンド プロセスを無人モードで開始すると、セッション 0 で実行されます。
 ユーザー インターフェイスが必要 - 実行に UI の生成が必要なプロセス、またはクリックなどの対話型アクティビティを含むプロセスです。こうしたプロセスは、1 人のユーザーに対して一度に1つしか実行できません。
ユーザー インターフェイスが必要 - 実行に UI の生成が必要なプロセス、またはクリックなどの対話型アクティビティを含むプロセスです。こうしたプロセスは、1 人のユーザーに対して一度に1つしか実行できません。
複数のバックグラウンド プロセスと、UI を必要とするプロセス 1 つを、同じユーザーが同時に実行することができます。
同じ Windows Server 端末において、複数の高密度ロボットでジョブを開始した場合、選択したプロセスが指定したそれぞれのロボットによって同時に実行されることになります。これらの各実行のインスタンスは [ジョブ] ページで作成および表示します。
高密度ロボットを使用し、そのマシン上で RDP を有効化しない場合は、ジョブを開始するたびに、次のエラーが表示されます: 「A specified logon session does not exist.It may already have been terminated.」(指定したジョブセッションは存在しません。すでに終了した可能性があります)。
高密度ロボットの設定方法については、「高密度ロボット用の Windows Server を設定する」をご覧ください。
請求書処理やパフォーマンス レビューなど、論理的な断片化や人間の介入 (検証、承認、例外処理) を必要とするプロセスは、UiPath スイートのツール セットで処理されます。このセットは、オーケストレーション プロセスと呼ばれる Studio の専用プロジェクト テンプレート、Action Center のアクションやリソース割り当て機能で構成されます。
大まかに言うと、アクティビティのペアでワークフローを構成します。ワークフローは、特定の要件が満たされた場合にのみ一時停止されたジョブを再開できるように、実行の詳細でパラメーター化できます。要件が満たされた後にのみ、リソースがジョブの再開に割り当てられるため、消費の面で無駄がなくなります。
Orchestrator では、これは、ジョブを一時停止状態にし、要件が満たされるのを待ち、ジョブを再開して、通常どおり実行することによって、マークされます。使用するペアに応じて、完了要件が変わり、Orchestrator の応答がそれに応じて調整されます。
ジョブ
|
アクティビティ |
ユースケース |
|---|---|
|
キュー アイテムのアップロードなどのジョブ条件を導入します。 メインジョブが一時停止された後、補助ジョブが実行されます。このプロセスが完了すると、メインジョブが再開されます。ワークフローの構成方法に応じて、再開されたジョブは、補助プロセスの実行から取得したデータを利用できます。 注: ワークフローがジョブを開始して参照を取得アクティビティを使用して別のアクティビティを呼び出す場合、ロボットのロールは、次の権限で更新する必要があります。
|
キュー
|
アクティビティ |
ユースケース |
|---|---|
|
キュー アイテムを処理するなどのキュー条件を導入します。 メイン ジョブが一時停止された後、補助ジョブでキュー アイテムを処理する必要があります。このプロセスが完了すると、メイン ジョブが再開されます。ワークフローの構成方法に応じて、再開されたジョブは、処理されたキュー アイテムから取得された出力データを利用できます。 |
アクション
フォーム アクション
|
アクティビティ |
ユースケース |
|---|---|
|
ユーザーが介入する条件を提示します。介入する場合は UiPath Action Center でアクションとして表示されます。 ジョブが中断されると、Action Center でアクションが生成されます。 アクションが完了しないかぎり、ジョブは再開されません。 フォーム アクションは、割り当てられたユーザーが完了する必要があります。ユーザーの割り当ては、Action Center で直接行うか、[タスクを割り当て] アクティビティを使用します。 |
外部アクション
|
アクティビティ |
ユースケース |
|---|---|
|
ユーザーが介入する条件を提示します。介入する場合は UiPath Action Center でアクションとして表示されます。 ジョブが中断されると、Action Center でアクションが生成されます。 タスクが完了しないかぎり、ジョブは再開されません。 外部アクションは、アクションに対する編集権限および関連するフォルダーへのアクセス権限を持つユーザーであれば、誰でも完了できます。 |
ドキュメント検証アクション
|
アクティビティ |
ユースケース |
|---|---|
|
ユーザーが介入する条件を提示します。介入する場合は UiPath Action Center でアクションとして表示されます。 ジョブが中断されると、Action Center でアクションが生成されます。 タスクが完了しないかぎり、ジョブは再開されません。 割り当てられたユーザーは、ドキュメント検証アクションを完了する必要があります。ユーザーの割り当ては、Orchestrator で直接行うか、[タスクを割り当て] アクティビティを使用します。 ロボットがストレージ バケットのデータをアップロード、ダウンロード、削除するには、適切な権限を付与されている必要があります。そのためには、以下の権限を持つように Robot のロールを更新します。
|
 ダウンロード後にドキュメント データを削除するには:
ダウンロード後にドキュメント データを削除するには:
Duration
|
アクティビティ |
ユースケース |
|---|---|
|
遅延として時間間隔を導入します。その間、ワークフローは中断されます。 遅延が経過した後、ジョブが再開されます。 |
ジョブ フラグメントは、同じロボットによる実行に限定されません。これらは、ジョブが再開されて実行準備が整ったときに使用できるロボットで実行できます。これは、ジョブの定義時に構成された実行ターゲットにも依存します。
例
特定のロボット (ここでは X、Y、Z とします) で実行されるようにジョブを定義しています。Z のみが使用可能なときにこのジョブを開始すると、ユーザーの検証待ちで中断されるまでジョブは Z で実行されます。検証後にジョブを再開するとき、X のみが使用可能であると、ジョブは X で実行されます。
- 監視という観点では、このようなジョブは、断片化されているかどうかや、複数のロボットで実行されたかどうかに関係なく、1 つとしてカウントされます。
- 中断しているジョブをロボットに割り当てることはできません。割り当てることができるのは、再開したジョブのみです。
中断しているジョブを再開するために必要なトリガーを確認するには、[ジョブの詳細] ウィンドウの [トリガー] タブを確認します。