- Introdução
- Melhores práticas
- Tenant
- Sobre o contexto do tenant
- Pesquisa de recursos em um tenant
- Gerenciamento de robôs
- Conectar Robôs ao Orchestrator
- Armazenamento de credenciais do robô no CyberArk
- Armazenamento de senhas do Unattended Robot no Azure Key Vault (somente leitura)
- Armazenamento de credenciais do Unattended Robot no HashiCorp Vault (somente leitura)
- Armazenando credenciais de Unattended Robots no AWS Secrets Manager (somente leitura)
- Exclusão de sessões não assistidas desconectadas e não responsivas
- Autenticação do robô
- Autenticação de robôs com credenciais de cliente
- Autenticação do SmartCard
- Auditar
- Configurações - Nível do tenant
- Serviço Catálogo de recursos
- Contexto de Pastas
- Automações
- Processos
- Trabalhos
- Gatilhos
- Logs
- Monitoramento
- Filas
- Ativos
- Armazenar Buckets
- Teste do Orquestrador
- Outras configurações
- Integrações
- Robôs Clássicos
- Administração do host
- Sobre o nível do host
- Gerenciamento dos administradores do sistema
- Gerenciando Tenants
- Configurando notificações de e-mail do sistema
- Logs de auditoria para o portal do host
- Modo de Manutenção
- Administração da organização
- Solução de problemas

Guia do usuário do Orchestrator
Um trabalho representa a execução de um processo no UiPath Robot. É possível iniciar a execução de um trabalho no modo assistido ou não assistido. Você não pode iniciar um trabalho a partir do Orchestrator em robôs assistidos, e eles não podem ser executados em uma tela bloqueada.
|
Modo assistido |
modo não assistido |
|---|---|
|
Página Automações > Trabalhos Página Automações > Gatilhos Página Automações > Processos |
Por padrão, qualquer processo pode ser editado enquanto tiver trabalhos em execução ou pendentes associados.
- A execução de trabalhos associados a um processo modificado usa a versão inicial do processo. A versão atualizada é usada para trabalhos recém-criados ou no próximo gatilho do mesmo trabalho.
- Trabalhos pendentes associados a um processo modificado usam a versão atualizada.
Há três fontes possíveis de trabalhos, dependendo do mecanismo de iniciação do trabalho:
- Manual — o trabalho foi iniciado e configurado a partir das páginas Trabalhos/Gatilhos/Processos usando o botão Iniciar.
- Agente - o trabalho foi iniciado no modo assistido da bandeja do UiPath Robot, UiPath Assistant ou usando a Linha de Comando.
- [Trigger_Name] - o trabalho foi iniciado por meio de um gatilho, usado para a execução de trabalhos pré-planejados.
|
Description | |
|---|---|
|
Alocar de forma dinâmica |
Um processo em primeiro plano é executado várias vezes sob o usuário e a máquina que ficarem disponíveis primeiro. Se o usuário também estiver selecionado, apenas a alocação da máquina é feita dinamicamente. Os processos de segundo plano são executados em qualquer usuário, independentemente de estar ocupado ou não, desde que você tenha tempos de execução suficientes. Você pode executar um processo até 10.000 vezes. |
|
Robôs Específicos |
O processo é executado por determinados Robôs, conforme selecionado na lista de robôs. |
Em uma máquina do host, você precisa provisionar um usuário do Windows para cada usuário que pertença às pastas às quais o modelo de máquina correspondente é atribuído.
Digamos que você conectou um servidor ao Orchestrator usando a chave gerada pelo modelo de máquina, FinanceT. Esse modelo da máquina é atribuído às pastas FinanceExecution e FinanceHR, onde seis usuários também são atribuídos. Esses seis usuários precisam ser provisionados como usuários do Windows no servidor.
Se você configurar um trabalho para executar o mesmo processo várias vezes, uma entrada de trabalho é criada para cada execução. Os trabalhos são ordenados com base em sua prioridade e hora de criação, com os trabalhos mais antigos e de maior prioridade sendo colocados primeiro na fila. Assim que um robô fica disponível, ele executa o próximo trabalho na fila. Até que isso aconteça, os trabalhos permanecem em um estado pendente.
Exemplo
Configuração
- 1 pasta
- 1 modelo de máquina com dois runtimes
- 2 usuários: john.smith e petri.ota
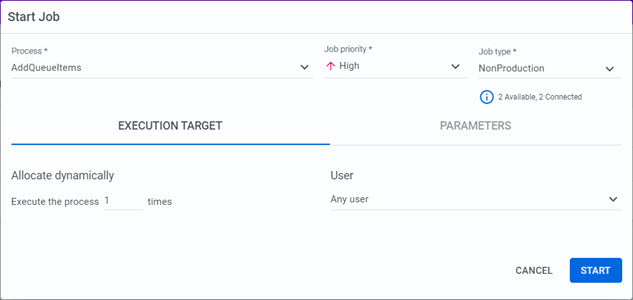
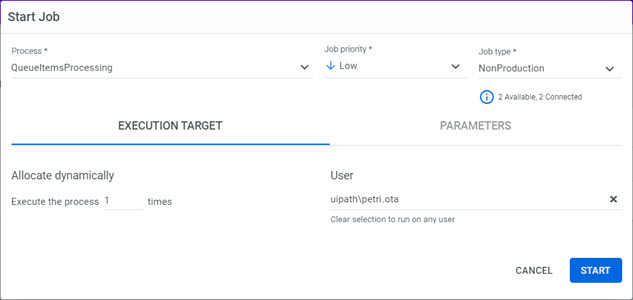
- 2 processos que exigem interação do usuário: P1 - que adiciona itens de fila a uma fila, P2 - que processa os itens na fila
- O modelo de máquina e os usuários devem estar associados à pasta que contém os processos.
Resultado desejado
- P1 é executado com uma alta prioridade por qualquer um.
- P2 é executado com uma baixa prioridade por Petri.
Configuração necessária do trabalho
- Inicie um trabalho usando P1, sem atribuí-lo a nenhum usuário específico, e defina a prioridade como Alta.
- Inicie um trabalho para P2, atribua-o a petri.ota e defina a prioridade como Baixa.
Você pode controlar qual trabalho tem precedência sobre outros trabalhos concorrentes por meio do campo Prioridade dos trabalhos, seja ao implantar o processo ou ao configurar um trabalho/gatilho para esse processo. Um trabalho pode ter uma das seguintes prioridades: Baixa (↓), Normal (→), Alta (↑).
Iniciar um trabalho manualmente
A prioridade é herdada de onde foi configurada inicialmente. Você pode deixar isso como está, ou fazer alguma alteração.
PáginaAutomações > Trabalhos: Herda a prioridade definida no nível do processo.
Página Automações > Gatilhos: herda o conjunto de prioridades definido no nível do gatilho. Se o gatilho em si herdou a prioridade do nível do processo, então ela será usada.
PáginaAutomações > Processos: Usa a prioridade definida para aquele processo.
Se você configurar um trabalho para executar o mesmo processo várias vezes, uma entrada de trabalho é criada para cada execução. Os trabalhos são ordenados com base em sua prioridade e hora de criação, com os trabalhos mais antigos e de maior prioridade sendo colocados primeiro na fila. Assim que um robô fica disponível, ele executa o próximo trabalho na fila. Até que isso aconteça, os trabalhos permanecem em um estado pendente.
Iniciar um trabalho por meio de um gatilho
A prioridade é definida por padrão como Herdado, o que significa que herda o valor definido no nível do processo. Escolher um processo atualiza automaticamente o ícone de seta para ilustrar qual valor foi definido no nível do processo. Quaisquer trabalhos iniciados pelo gatilho têm a prioridade definida no nível do gatilho. Se o Herdado padrão for mantido, os trabalhos serão lançados com a prioridade no nível do processo.
Há dois tipos de processos, de acordo com os requisitos da interface do usuário:
 Processo em segundo plano - Não requer uma interface do usuário nem a intervenção do usuário para ser executado. Por esse motivo, você pode executar vários trabalhos desse tipo no modo não assistido no mesmo usuário simultaneamente. Cada execução requer uma licença Não Assistida/NonProduction. Os processos em segundo plano executados na Sessão 0 quando iniciados no modo não assistido.
Processo em segundo plano - Não requer uma interface do usuário nem a intervenção do usuário para ser executado. Por esse motivo, você pode executar vários trabalhos desse tipo no modo não assistido no mesmo usuário simultaneamente. Cada execução requer uma licença Não Assistida/NonProduction. Os processos em segundo plano executados na Sessão 0 quando iniciados no modo não assistido.
 Requer a Interface do Usuário - Requer a interface do usuário pois a execução precisa que a UI seja gerada ou o processo contém atividades interativas, como Clicar. Você só pode executar um processo desse tipo em um usuário de cada vez.
Requer a Interface do Usuário - Requer a interface do usuário pois a execução precisa que a UI seja gerada ou o processo contém atividades interativas, como Clicar. Você só pode executar um processo desse tipo em um usuário de cada vez.
O mesmo usuário pode executar vários processos em segundo plano e um único processo que requer a Interface Gráfica ao mesmo tempo.
Se você iniciar um trabalho em vários Robôs de alta densidade a partir da mesma máquina do Windows Server, isso significa que o processo selecionado é executado por cada Robô especificado ao mesmo tempo. Uma instância para cada uma dessas execuções é criada e exibida na página Trabalhos.
Se você estiver usando robôs de alta densidade e não habilitou o RDP naquela máquina, sempre que iniciar um trabalho, o seguinte erro será exibido: “Uma sessão de logon especificada não existe. Ela pode já ter sido encerrada.”
Para saber como configurar sua máquina para Robôs de alta densidade, consulte a página Sobre a configuração do Windows Server para Robôs de alta densidade.
Processos que exigem fragmentação lógica ou intervenção humana (validações, aprovações, tratamento de exceções), como processamento de faturas e análises de desempenho, são tratados com um conjunto de instrumentos na suíte UiPath: um modelo de projeto dedicado no Studio chamado Orchestration Process, ações e alocação de recursos recursos na Action Center.
De forma ampla, você configura seu fluxo de trabalho com algumas atividades. O fluxo de trabalho pode ser parametrizado com os dados específicos da execução para que um trabalho suspenso seja retomado apenas se determinados requisitos tiverem sido cumpridos. Apenas após os requisitos serem atendidos, os recursos serão alocados para a retomada do trabalho, garantindo, assim, que não haja desperdício de consumo.
No Orchestrator, isso é marcado pelo trabalho estando suspenso, esperando para que os requisitos sejam atendidos, e então o trabalho sendo retomado e executado de acordo com o padrão. Dependendo do par que você usar, os requisitos de conclusão mudam e a resposta do Orchestrator se ajusta de acordo com isso.
Trabalhos
|
Atividades |
Caso de uso |
|---|---|
|
Introduza uma condição de trabalho, como carregar itens da fila. Após o trabalho principal ser suspenso, o trabalho auxiliar é executado. Após a conclusão desse processo, o trabalho principal é retomado. Dependendo de como você configurou seu fluxo de trabalho, o trabalho retomado pode fazer uso dos dados obtidos na execução do processo auxiliar. Observação: se seu fluxo de trabalho usa a atividade Start Job and Get Reference para invocar outro fluxo de trabalho, sua função de Robô deve ser atualizada com as seguintes permissões:
|
Filas
|
Atividades |
Caso de uso |
|---|---|
|
Introduza uma condição de fila, tal como ter itens de fila processados. Após o trabalho principal ser suspenso, os itens da fila precisam ser processados por meio de trabalho auxiliar. Após a conclusão desse processo, o trabalho principal é retomado. Dependendo de como você configurou seu fluxo de trabalho, o trabalho retomado pode fazer uso dos dados de saída obtidos do item de fila processado. |
Ações
Ações de formulário
|
Atividades |
Caso de uso |
|---|---|
|
Introduza as condições de intervenção do usuário, encontradas no UiPath Action Center como ações. Após a suspensão do trabalho, uma ação é gerada na Action Center. O trabalho só é retomado após a conclusão da ação. As ações do formulário precisam ser concluídas pelo usuário atribuído. A atribuição do usuário pode ser tratada diretamente na Action Center ou por meio da atividade Atribuir Tarefas . |
Ações externas
|
Atividades |
Caso de uso |
|---|---|
|
Introduza as condições de intervenção do usuário, encontradas no UiPath Action Center como ações. Após a suspensão do trabalho, uma ação é gerada na Action Center. O trabalho só é retomado após a conclusão da tarefa. As ações externas podem ser concluídas por qualquer usuário com permissões de Edição em Ações e o acesso à pasta associada. |
Ações de Validação de Documento
|
Atividades |
Caso de uso |
|---|---|
|
Introduza as condições de intervenção do usuário, encontradas no UiPath Action Center como ações. Após a suspensão do trabalho, uma ação é gerada na Action Center. O trabalho só é retomado após a conclusão da tarefa. As ações de Validação de Documentos precisam ser concluídas pelo usuário atribuído. A atribuição do usuário pode ser feita diretamente no Orchestrator ou por meio da atividade Assign Tasks. Para que o Robô possa carregar, baixar e excluir dados do bucket de armazenamento, ele precisa receber as permissões apropriadas. Isso pode ser feito atualizando a função de Robô com o seguinte:
|
 Para excluir dados de documentos após o download:
Para excluir dados de documentos após o download:
Duration
|
Atividade |
Caso de uso |
|---|---|
|
Introduza um intervalo de tempo como um atraso, durante o qual o fluxo de trabalho é suspenso. Depois que o atraso tiver passado, o trabalho é retomado. |
Os fragmentos do trabalho não estão restritos a serem executados pelo mesmo Robô. Eles podem ser executados por qualquer Robô que esteja disponível quando o trabalho é retomado e está pronto para execução. Isso também depende do destino de execução configurado ao definir o trabalho.
Exemplo
Defini meu trabalho para ser executado por Robôs específicos, digamos que X, Y e Z. Quando inicio o trabalho apenas Z está disponível, portanto, o trabalho é executado por Z até ser suspenso no aguardo da validação do usuário. Após o trabalho ser validado, e então retomado, apenas X está disponível, portanto, o trabalho é executado por X.
- Do ponto de vista do monitoramento, tal trabalho é visto como um, independentemente de ter sido fragmentado ou executado por diferentes Robôs.
- Os trabalhos suspensos não podem ser atribuídos a Robôs, apenas os retomados é que podem.
Para verificar os gatilhos necessários para a retomada de um trabalho suspenso, verifique a aba Gatilhos na janela Detalhes do Trabalho.
Para trabalhos não assistidos com falha, se seu processo tiver a opção Habilitar gravação ativada, você pode baixar a mídia de execução correspondente para verificar os últimos momentos de execução antes da falha.
A opção Baixar gravação é exibida somente na janela Trabalhos se você tiver permissões de Exibir na Mídia de Execução.