- Primeros pasos
- Mejores prácticas
- Tenant
- Acerca del contexto de tenant
- Buscar recursos en un tenant
- Gestionar robots
- Conexión de los robots a Orchestrator
- Ejemplos de configuración
- Almacenar credenciales de robots en CyberArk
- Configuración de los robots atendidos
- Configuración de los robots desatendidos
- Almacenamiento de contraseñas de robot desatendido en Azure Key Vault (solo lectura)
- Almacenar las credenciales de robots desatendidos en HashiCorp Vault (solo lectura)
- Eliminar sesiones desconectadas y sin respuesta no atendidas
- Autenticación de Robot
- Autenticación de robots con credenciales de cliente
- Autenticación por SmartCard
- Auditoría
- Servicio de catálogo de recursos
- Contexto de carpetas
- Automatizaciones
- Procesos
- Trabajos
- Desencadenadores
- Registros
- Supervisión
- Colas
- Activos
- Depósitos de almacenamiento
- Pruebas de Orchestrator
- Integraciones
- Robots clásicos
- Gestionar robots
- Estados de los robots
- Ejemplos de configuración
- Trabajos
- Desencadenadores
- Recursos
- Solución de problemas
Guía del usuario de Orchestrator
Esta página describe una asignación entre un par de escenarios de vida real y la configuración correspondiente de Orchestrator realizado en carpetas clásicas.
Antes de asignar, lee primero cómo encontrar el nombre de usuario (y el dominio si es el caso) que has iniciado en tu máquina y cómo encontrar el propio máquina de la máquina.
|
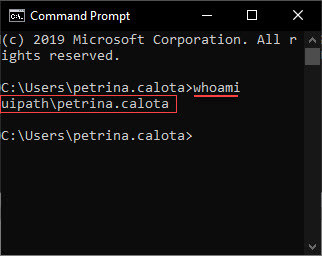
Encontrar el nombre de usuario |
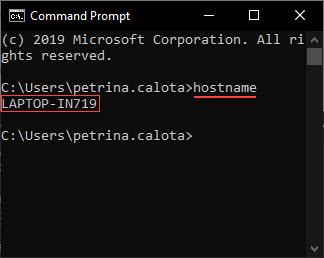
Buscar el nombre de la máquina |
|---|---|
|
Para mostrar el dominio y el nombre de usuario, sigue los siguientes pasos:
|
Para mostrar el nombre de la máquina, sigue los siguientes pasos:
|

En las carpetas clásicas, solo puedes configurar las configuraciones flotantes de tipo atendido. Para las configuraciones flotantes no atendidos, migrará las carpetas modernas.
1 Combinación Usuario/Máquina
A John la empresa para la que trabaja le proporciona un portátil en el que trabaja todos los días.
Inicia sesión en su portátil con sus credenciales.
El identificador único (nombre de la máquina) del portátil es JOSMITH.
|
Configuración de la vida real |
|---|
|
1 usuario 1 Máquina 1 combinación usuario/máquina: se mantiene igual día tras día. |
|
Configuración flotante de Orchestrator |
|---|
|
Una plantilla de máquina. Su nombre no es relevante. Un robot flotante para el usuario. El robot es identificado por John (utilizando la sintaxis
domain\username).
John conecta su UiPath Robot a Orchestrator usando la clave generada por la plantilla de máquina. |
|
Configuración estándar de Orchestrator |
|---|
|
Una máquina estándar definida utilizando el nombre exacto de la estación de trabajo de John, por ejemplo JOSMITH. Un robot estándar para la combinación de usuario/máquina. El robot es identificado por John (utilizando la sintaxis
domain\username), y la máquina de John, (utilizando la entidad de máquina estándar creado anteriormente).
John conecta su UiPath Robot a Orchestrator utilizando la clave generada por la máquina estándar con el nombre JOSMITH. |
2 Combinaciones Usuario/Máquina
Boris y Vadim trabajan de operadores de atención al cliente. Trabajan en dos turnos en el mismo ordenador.
Cada uno inicia sesión en el ordenador usando sus credenciales.
El identificador único del portátil es PC345.
|
Configuración de la vida real |
|---|
|
2 Usuarios 1 Máquina 2 combinaciones de usuario/máquina: se mantienen igual día tras día: {(Boris - PC345), (Vadim - PC345)} |
|
Configuración flotante de Orchestrator |
|---|
|
Una plantilla de máquina. Su nombre no es relevante. Dos robots flotantes. Tanto Vadim como Boris conectan sus UiPath Robots a Orchestrator utilizando la clave generada por la plantilla de máquina. |
|
Configuración estándar de Orchestrator |
|---|
|
Una máquina estándar definida utilizando el nombre exacto de la estación de trabajo, por ejemplo PC345. Dos robots estándar, uno para cada combinación de usuario/máquina.
Tanto Vadim como Boris conectan sus UiPath Robots a Orchestrator utilizando la clave generada por la máquina estándar PC345. Cada robot estándar debe definirse utilizando la máquina estándar correspondiente. Para conservar los campos Tipo y Máquina al crear los robots, habilita la casilla de verificación Crear nuevo.Alternativamente, para un robot ya existente, haz clic en Más acciones > Duplicar. |
3 Combinaciones Usuario/Máquina
Randy, Kanye y Juanita trabajan en máquinas virtuales, en imágenes persistentes de escritorios virtuales que se entregan a sus terminales mediante una red. Cada uno de ellos usa la misma MV todos los días.
Cada uno de ellos inicia sesión en la MV usando sus credenciales.
Los identificadores únicos de las máquinas virtuales son: RAND32, KAN43 y JUA65.
|
Configuración de la vida real |
|---|
|
3 Usuarios 3 Máquinas 3 combinaciones usuario/máquina que permanecen igual día tras día: {(Randy - RAND32), (Kanye - KAN43), (Juanita - JUA65)} |
|
Configuración flotante de Orchestrator |
|---|
|
Una plantilla de máquina. Su nombre no es relevante. Tres robots flotantes. Cada usuario conecta sus UiPath Robots a Orchestrator usando la clave generada por la misma plantilla de máquina. |
|
Configuración estándar de Orchestrator |
|---|
|
Tres máquinas estándar definidas utilizando el nombre exacto de las estaciones de trabajo, por ejemplo, RAND32, KAN43 y JUA65. Tres robots estándar, cada uno para una combinación usuario/máquina.
Cada usuario conecta sus Robots de UiPath a Orchestrator utilizando la clave generada por la máquina estándar con el mismo nombre que su estación de trabajo. Cada robot estándar debe definirse utilizando la máquina estándar correspondiente. Para conservar los campos Tipo y Máquina al crear los robots, habilita la casilla de verificación Crear nuevo.Alternativamente, para un robot ya existente, haz clic en Más acciones > Duplicar. |
9 Combinaciones Usuario/Máquina
Ion, Sandu y Georgeta trabajan en máquinas virtuales, en imágenes no persistentes de escritorios virtuales que se entregan a sus terminales mediante una red. Cada día se les asigna aleatoriamente una MV de un grupo de 3 MV.
Cada uno de ellos inicia sesión en la MV usando sus credenciales.
Los identificadores únicos de las MV son: VM10, VM11, VM12.
|
Configuración de la vida real |
|---|
|
3 Usuarios 3 Máquinas 9 combinaciones usuario/máquina que son aleatorias {(Ion - VM10), (Ion - VM11), (Ion - VM12), (Sandu - VM10), (Sandu - VM11), (Sandu - VM12), (Georgeta - VM10), (Georgeta - VM11), (Georgeta - VM12)} |
|
Configuración flotante de Orchestrator |
|---|
|
Una plantilla de máquina. Su nombre no es relevante. Tres robots flotantes. Cada usuario conecta sus UiPath Robots a Orchestrator usando la clave generada por la misma plantilla de máquina. |
|
Configuración estándar de Orchestrator |
|---|
|
Tres máquinas estándar definidas utilizando el nombre exacto de las estaciones de trabajo, por ejemplo, VM10, VM11 y VM12. Nueve robots estándar, cada uno para una combinación de usuario/máquina.
Cada usuario conecta sus UiPath Robots a Orchestrator utilizando la clave generada por la máquina estándar con el mismo nombre que su VM. Cada robot estándar debe definirse utilizando la máquina estándar correspondiente. Para conservar los campos Tipo y Máquina al crear los robots, habilita la casilla de verificación Crear nuevo.Alternativamente, para un robot ya existente, haz clic en Más acciones > Duplicar. |