- Erste Schritte
- Best Practices
- Mandant
- Über den Kontext „Mandant“
- Suche nach Ressourcen in einem Mandanten
- Verwaltung von Robotern
- Verbindung von Robotern mit Orchestrator
- Beispiele für die Einrichtung
- Speicherung von Roboterzugangsdaten in CyberArk
- Einrichten von Attended-Robotern
- Einrichten von Unattended-Robotern
- Speichern von Unattended-Roboterkennwörtern in Azure Key Vault (schreibgeschützt)
- Speichern der Anmeldeinformationen von Unattended-Robotern im HashiCorp Vault (schreibgeschützt)
- Löschen von getrennten und nicht reagierenden Unattended-Sitzungen
- Roboter-Authentifizierung
- Roboter-Authentifizierung mit Client-Anmeldeinformationen
- SmartCard-Authentifizierung
- Audit
- Ressourcenkatalogdienst
- Ordnerkontext
- Automatisierungen
- Prozesse
- Jobs
- Auslöser
- Protokolle
- Überwachung
- Warteschlangen
- Assets
- Speicher-Buckets
- Testverfahren in Orchestrator
- Integrationen
- Klassische Roboter
- Verwaltung von Robotern
- Roboterstatus
- Beispiele für die Einrichtung
- Jobs
- Auslöser
- Ressourcen
- Fehlersuche und ‑behebung
Orchestrator-Anleitung
Diese Seite beschreibt eine Zuordnung zwischen verschiedenen realen Szenarien und dem entsprechenden Orchestrator-Setup in klassischen Ordnern.
Bevor Sie mit der Zuordnung fortfahren, lesen Sie zuerst, wie Sie den Benutzernamen (und ggf. die Domäne) finden, mit dem Sie an Ihrer Maschine angemeldet sind, und wie Sie den Namen der Maschine selbst herausfinden.
|
Finden des Benutzernamens |
Finden des Maschinennamens |
|---|---|
|
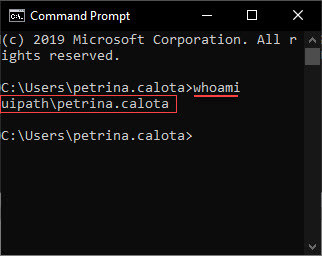
Führen Sie die nächsten Schritte aus, um die Domäne und den Benutzernamen anzuzeigen:
|
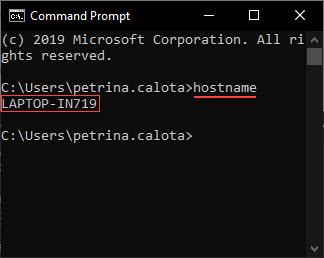
Um den Namen der Maschine anzuzeigen, führen Sie die nächsten Schritte aus:
|

In klassischen Ordnern können Sie nur Floating-Setups vom Attended-Typ konfigurieren. Migrieren Sie bei Unattended-Floating-Setups zu modernen Ordnern.
1 Benutzer-/Maschinenkombination
John wurde von der Firma, für die er arbeitet, ein Laptop zur Verfügung gestellt, an dem er täglich arbeitet.
Er meldet sich auf seinem Laptop mit seinen Anmeldeinformationen an.
Die eindeutige Kennung (Maschinenname) des Laptops ist JOSMITH.
|
Reales Setup |
|---|
|
1 Benutzer 1 Maschine 1 Benutzer-/Maschinenkombination – bleibt jeden Tag gleich. |
|
Orchestrator-Floating-Setup |
|---|
|
Eine Maschinenvorlage. Ihr Name ist nicht relevant. Ein Floating-Roboter für den Benutzer. Der Roboter wird von John identifiziert (mit der Syntax
domain\username).
John verbindet seinen UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der Maschinenvorlage generiert wird. |
|
Orchestrator-Standard-Setup |
|---|
|
Eine Standardmaschine, die mit dem genauen Namen der Workstation von John definiert wurde, nämlich JOSMITH. Ein Standardroboter für die Benutzer-/Maschinenkombination. Der Roboter wird von John (mit der Syntax
domain\username) und Johns Maschine (mit der oben erstellten Standard-Maschinenentität) identifiziert.
John verbindet seinen UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der Standardmaschine namens JOSMITH generiert wird. |
2 Benutzer-/Maschinenkombinationen
Boris und Vadim arbeiten im Callcenter. Sie arbeiten in 2 Schichten auf demselben Computer.
Sie melden sich mit ihren Anmeldeinformationen am Computer an.
Der eindeutige Bezeichner des Laptops ist PC345.
|
Reales Setup |
|---|
|
2 Benutzer 1 Maschine 2 Benutzer-/Maschinenkombinationen – Bleiben immer gleich: {(Boris - PC345), (Vadim - PC345)}. |
|
Orchestrator-Floating-Setup |
|---|
|
Eine Maschinenvorlage. Ihr Name ist nicht relevant. Zwei Floating-Roboter. Sowohl Vadim als auch Boris verbinden ihre UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der Maschinenvorlage generiert wird. |
|
Orchestrator-Standard-Setup |
|---|
|
Eine Standardmaschine, die mit dem genauen Namen der Workstation definiert wurde, nämlich PC345. Zwei Standardroboter, einer für jede Benutzer-/Maschinenkombination.
Sowohl Vadim als auch Boris verbinden ihre UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der Standardmaschine namens PC345 generiert wird. Jeder Standardroboter muss mit der jeweiligen Standardmaschine definiert werden. Aktivieren Sie das Kontrollkästchen Weiteren erstellen, um die Felder Typ und Maschine beim Erstellen der Roboter beizubehalten. Alternativ klicken Sie für einen bereits vorhandenen Roboter auf Weitere Aktionen > Duplizieren. |
3 Benutzer-/Maschinenkombinationen
Randy, Kanye und Juanita arbeiten auf virtuellen Maschinen, über persistente virtuelle Desktop-Images, die über ein Netzwerk an ihre Endgeräte übermittelt werden. Jeder von ihnen verwendet täglich die gleiche VM.
Sie melden sich jeweils mit ihren Anmeldeinformationen bei den VMs an.
Die eindeutigen Bezeichner der VMs sind: RAND32, KAN43 und JUA65.
|
Reales Setup |
|---|
|
3 Benutzer 3 Maschinen 3 Benutzer-/Maschinenkombinationen, die immer gleich bleiben: {(Randy - RAND32), (Kanye - KAN43), (Juanita - JUA65) |
|
Orchestrator-Floating-Setup |
|---|
|
Eine Maschinenvorlage. Ihr Name ist nicht relevant. Drei Floating-Roboter. Jeder Benutzer verbindet seine UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der gleichen Maschinenvorlage generiert wird. |
|
Orchestrator-Standard-Setup |
|---|
|
Drei Standardmaschinen, die mit dem genauen Namen der Workstations definiert wurden, nämlich RAND32, KAN43 und JUA65. Drei Standardroboter, einer für jede Benutzer-/Maschinenkombination.
Jeder Benutzer verbindet seine UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der Standardmaschine mit dem gleichen Namen wie die Workstation generiert wird. Jeder Standardroboter muss mit der jeweiligen Standardmaschine definiert werden. Aktivieren Sie das Kontrollkästchen Weiteren erstellen, um die Felder Typ und Maschine beim Erstellen der Roboter beizubehalten. Alternativ klicken Sie für einen bereits vorhandenen Roboter auf Weitere Aktionen > Duplizieren. |
9 Benutzer-/Maschinenkombinationen
Ion, Sandu und Georgeta arbeiten auf virtuellen Maschinen über nicht persistente virtuelle Desktop-Images, die über ein Netzwerk an ihre Endgeräte übermittelt werden. Jeden Tag wird ihnen zufällig eine VM aus einem Pool von 3 VMs zugewiesen.
Sie melden sich jeweils mit ihren Anmeldeinformationen bei den VMs an.
Die eindeutigen Bezeichner der VMs sind: VM10, VM11, VM12.
|
Reales Setup |
|---|
|
3 Benutzer 3 Maschinen 9 Benutzer-/Maschinenkombinationen, die zufällig sind {{(Ion - VM10), (Ion - VM11), (Ion - VM12), (Sandu - VM10), (Sandu - VM11), (Sandu - VM12), (Georgeta - VM10), (Georgeta - VM11), (Georgeta - VM12)}} |
|
Orchestrator-Floating-Setup |
|---|
|
Eine Maschinenvorlage. Ihr Name ist nicht relevant. Drei Floating-Roboter. Jeder Benutzer verbindet seine UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der gleichen Maschinenvorlage generiert wird. |
|
Orchestrator-Standard-Setup |
|---|
|
Drei Standardmaschinen, die mit dem genauen Namen der Workstations definiert wurden, nämlich VM10, VM11, VM12. Neun Standardroboter, einer für jede Benutzer-/Maschinenkombination.
Jeder Benutzer verbindet seine UiPath-Roboter mit dem Orchestrator unter Verwendung des Schlüssels, der von der Standardmaschine mit dem gleichen Namen wie die VM generiert wurde. Jeder Standardroboter muss mit der jeweiligen Standardmaschine definiert werden. Aktivieren Sie das Kontrollkästchen Weiteren erstellen, um die Felder Typ und Maschine beim Erstellen der Roboter beizubehalten. Alternativ klicken Sie für einen bereits vorhandenen Roboter auf Weitere Aktionen > Duplizieren. |